| Version 29 (modified by Iliyankatsarski, on 11/30/11 at 02:21:41) (diff) |
|---|
Proba 2
ESA Proba-2
Proba-2, Proba stands for PRoject for OnBoard? Autonomy. The Proba satellites are among the smallest spacecraft ever to be flown by ESA, but they are making a big impact in the field of space technology. Proba-2 is the second of the series, building on nearly eight years of successful Proba-1 experience.
File:Proba2-1-HR.jpg? File:Proba-2-in-orbit-rear-view.jpg?
Mission Parameters
PROBA-2 Mission Parameters
Sponsor: ESA
Expected Life: 2 years
Primary Applications: Sun observations; technology demonstration
Primary SLR Applications: Precision orbit determination
COSPAR ID: 0905902
SIC Code: 8005
NORAD SSC Code: 36037
Launch Date: 02-Nov-2009
NP Bin Size: 15 seconds
RRA Diameter: 16 cm
RRA Shape: hemispherical
Reflectors: 7 corner cubes
Orbit: Sun-synchronous dusk-dawn
Altitude (mean): 757 km
Inclination: 98.445 degrees
Eccentricity: 0.00116-0.0025
Weight: 130 kg
PROBA 2 MISSION SUMMARY
Following on from the success of PROBA-1, which successfully completed its technological goals in its first year of flight and continues to provide valuable scientific data now into its fifth operational year, PROBA-2, now in phase C/D and due for launch in September 2007, will once again fly a suite of new technology demonstrators with an ‘added value’ science package of four experiments. Altogether there are seventeen new developments being flown on Proba-2, divided into two groups: platform technologies which are part of the infrastructure and are mission critical and passenger technologies to gain flight heritage and experience before committing them to the infrastructure of other missions. Of the four Science experiments, two are dedicated to solar physics. The two other will study the space weather (plasma physics) The paper will provide an overview of the PROBA-2 mission and spacecraft along with a description of the scientific payload and technology experiments
1.1. Mission objectives
The PROBA 2 mission objectives, as deduced from the ESA requirements, can be summarized as follows:
- PROBA 2 will be a platform to demonstrate and validate new, advanced technologies in order to promote their usage in future missions,
- As such, PROBA 2 shall accommodate a number of selected technology experiments,
- PROBA 2 shall furthermore accommodate a series of scientific payloads, in the fields of space environment (plasma) and solar observations;
- The PROBA 2 system shall be designed to support an in-orbit operational lifetime of 2 years;
- The PROBA 2 orbit shall be preferably a LEO Sun-synchronous orbit with minimized eclipse time;
- PROBA 2 shall have a high degree of spacecraft autonomy and ground support automation.
1.2. Launch and orbit
PROBA 2 is planned to be launched from Plesetsk, Russia, in September 2007, on a Rockot launcher. PROBA 2 will be a secondary-passenger of the launch of the SMOS (ESA) spacecraft. It will be directly injected in a Sun-synchronous LEO orbit, with an altitude between 700-800 km (baseline 728km) and with the LTAN at 6:00 AM +/- 15 minutes. The orbit injection accuracy provided by the launcher is sufficient to guarantee that the LTAN will remain within 6:00 AM +/- 45 minutes without the use of onboard propulsion. The orbital period is approximately 100 minutes. The targeted orbit is eclipse-free for 9 months per year, thus making the orbit well suited for the solar observing instruments. Maximum eclipse duration during the eclipse season is less than 20 minutes. Since the orbit remains acceptable for the solar observations during the complete mission lifetime, propulsion is not needed to support the mission. However, as is documented below, a propulsion system is accommodated onboard PROBA 2 as a technology demonstration.
1.3. Ground segment
As for PROBA1, the PROBA2 spacecraft will be operated from the Redu Ground station (Belgium).
PROBA 2 SPACE SEGMENT DESCRIPTION
PROBA 2 has a weight of less than 130 kg and belongs to the class of the mini-satellites (Figure 1). Its structure is built using aluminum and CFRP honeycomb panels. Triple junction Gallium Arsenide solar cells, body mounted on 1 panel and mounted on 2 deployable panels, provide the power to the spacecraft and a Li-Ion battery is used for energy storage. A battery-regulated, centrally switched 28V bus distributes the power to the units and the instruments. A high performance computer, based on the LEON processor provides the computing power to the platform and for instrument data processing. It accommodates the memory for house-keeping data storage as well as a mass memory for the payload image data. The telecommunications subsystem is designed to establish and maintain spaceground communications link with the ground segment while the spacecraft remains sun-pointing. It is CCSDS compatible for up- and downlink in the S-band. The set of ACNS units support Sun-pointing, inertial 3-axis attitude pointing as well as Earth pointing and a series of attitude maneuvers. Furthermore, it performs all required navigation and maneuvering computations onboard. The spacecraft platform provides full redundancy
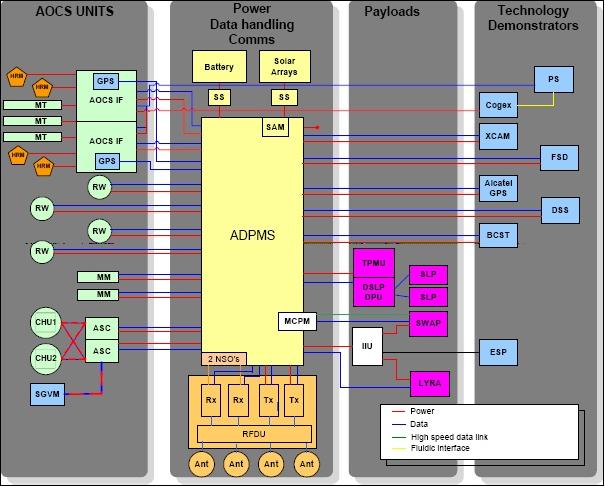
File:PROBA2 Auto11.jpeg? PROBA 2 block diagram
2.1. PROBA 2 platform
2.1.1. Mechanical and thermal
The PROBA 2 structure is derived from the PROBA 1 structure and is compatible with launchers such as ROCKOT, PSLV and DNEPR. The carrying part of the structure is composed of 3 aluminum honeycomb panels mounted in an H-structure and a bottom board. Almost all units are mounted on these inner panels. The bottom board acts as the interface with the launcher. All outer panels without solar cells mounted on them consist of aluminum honeycomb panels as well. They are painted black/white according to the needs of the thermal subsystem. The 2 deployable solar panels, as well as one outer panel with solar cells consist of honeycomb panels with aluminum core and CFRP sheets. The sheets supporting the solar cells are covered with kapton for electrical insulation. The deployable panels are permanently connected to the spacecraft body by hinges based on Carpentier joints. The Carpentier joints provide the opening torque at the moment of panel release as well as the self-locking in the deployed position. During launch, the stowed panels are kept in the stowed condition by the hold-down and release mechanism. This mechanism utilizes thermal knives to release each panel by software command in orbit.
The thermal control of the spacecraft is intended to be passive as far as possible. The sun-pointing attitude results however in a considerable thermal gradient through the spacecraft, making as such a completely passive thermal control difficult to achieve and heaters are foreseen to control the battery temperature. Heaters are also required to de-contaminate specific parts of the solar observation instruments. The SWAP instrument (see below) has a radiator mounted on the side of the spacecraft in order to keep the detector as cold as possible.
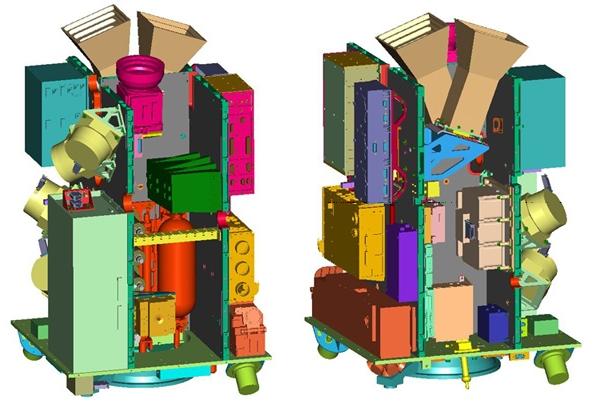
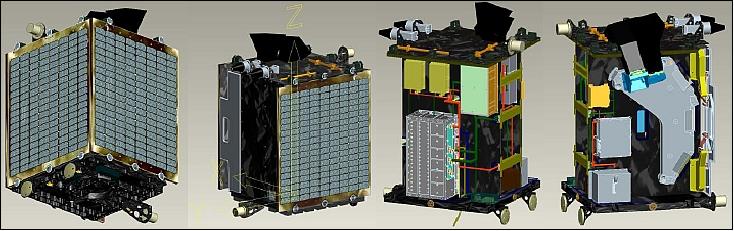
File:PROBA2 Auto14.jpeg? Figure 3 PROBA 2 internal structure and accommodation
2.1.2. Attitude control and Navigation system The PROBA 2 ACNS is strongly based on the PROBA 1 ACNS. The latter was a complex system providing (i) 3-axis attitude control including high accuracy pointing and maneuvering capabilities in different pointing modes, (ii) full spacecraft attitude control based only on target oriented commands and (iii) the demonstration of new technologies. Furthermore, it was developed relying heavily on the use of Computer-Aided Software Engineering tools. The PROBA 2 ACNS includes the full PROBA 1 ACNS, with the additional functionality to support the solar observation mission. This includes an improved Sun-model and the possible inclusion of a sun-sensor in the control loop. Furthermore, the ACNS incorporates a technology demonstration of a series of new algorithms:
- low-cost determination of the attitude and orbit using temperature, light and/or magnetic-field
sensors;
- the use of a Square-Root Unscented Kalman Filter (SR-UKF) for attitude and orbit
determination;
- autonomous, high-precision, recurrent largeangle manoeuvre capability during the Sun-
Observation Mode to avoid star-sensor blinding by the Earth
Finally, the ACNS functions support automatic “image paving” for the Sun-Imaging instrument (SWAP) in order to increase its actual field of view. PROBA 2, as PROBA 1, has been fitted with a highaccuracy double head star tracker, with GPS receiversand with a set of reaction wheels for the nominal ACNS operation. This set of sensors and actuators is complemented with the magnetotorquers and 3-axis magnetometers. As explained above, PROBA 2 carries as well an additional star tracker, an additional GPS, an additional magnetometer and a Sun Sensor as technology demonstrations.
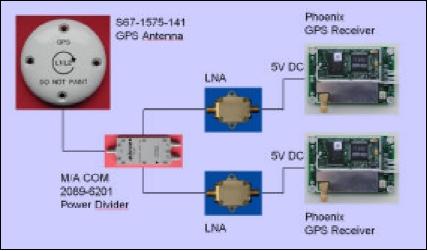
As on PROBA 1, the star tracker is the main attitude determination sensor. It provides full-sky coverage and achieves the high accuracy required for Sun pointing. The sensor can autonomously reconstruct the spacecraft’s inertial attitude starting from a “lost in space” attitude with a performance of a few arc-seconds up to an arc-minute. The attitude can be reconstructed at relatively high inertial rates, which allows the ACNS software to perform gyro-less rate measurements sufficiently accurately to control large-angle precise and stable manoeuvres. The model selected to fly on PROBA 2 is the micro-autonomous stellar compass (m- ASC), a next generation of the star tracker to that flown onboard PROBA 1. It requires less electrical power, has a lower mass and smaller volume, can connect to 4 camera heads instead of to 2 (although only 2 are used in PROBA 2) and provides attitude output at 4 Hz instead of 2 Hz. The star tracker is provided by the Technical University of Denmark. Orbit and time knowledge is acquired autonomously from measurements performed by a GPS receiver. As a technology demonstration, PROBA 2 flies a redundant set of Phoenix GPS receivers provided by DLR.
File:PROBA2 Auto2.jpeg? Phoenix GPS architecture for PROBA-2
It is a miniature receiver specifically designed for high dynamics space applications. It is based on SigTech?’s commercial-off-the-shelf MG5001 receiver board but operates a proprietary firmware developed by DLR. Though originally designed for automotive applications, the receiver board has been qualified for space use in a series of thermal-vacuum, vibration and total ionization dose tests. The receiver employs a GP4020 baseband processor which combines a 12 channel GP2021 correlator and an ARM7TDMI microprocessor kernel. At a power consumption of less than one Watt and a board size of 50 x 70 mm the receiver is among the smallest of its kind and particularly well suited for satellites with limited onboard resources. The Phoenix receiver is extensively used in European sounding rocket missions and has been selected for various other micro-satellite missions in low Earth orbit (LEO) such as X-Sat, ARGO, Flying Laptop and PRISMA. Specific features of the Phoenix receiver software for LEO applications include optimized tracking loops for high accuracy code and carrier tracking, precision timing and integer ambiguities for carrier phase based relative navigation, a twoline elements orbit propagator for signal acquisition aiding, and an attitude interface to account for non-zenith pointing antennas in the channel allocation process. A pulse-per-second signal enables synchronization to GPS (or UTC) time with an accuracy of better than 1ms. Noise levels of 0.4 m (pseudorange) and 0.5 mm (carrier phase) at representative signal conditions (C/N0=45dB-Hz) have been demonstrated in signal simulator and open air tests which render the receiver suitable for precise orbit determination. While the instantaneous (kinematic) navigation solution is restricted to an accuracy of roughly 10m (3D rms) due to broadcast ephemeris errors and unaccounted ionospheric path delays, an accuracy of about 0.5-1m can be achieved in a ground based precise orbit determination.
The orbital information allows pointing of the spacecraft towards any point on Earth (by using as well an onboard Earth-rotation ephemeris calculator), to autonomously determine the optimal moments for a high-angle maneuver to avoid sensor blinding by the Earth and to perform accurate Sun-pointing. The generation of control torques is by means of four reaction wheels (Dynacon, Canada) mounted in a tetrahedron configuration. Their inertia capacity is 0.65 Nms and their maximum torque capacity is 30 mNm. The reaction wheels are an evolution of those used on the Canadian MOST mission.
All ACNS sensors and actuators are controlled by the ACNS software running on the central LEON based computer and provides functions including:
- Navigation (NAV) which consists in the onboard Kalman filter based autonomous
estimation of the orbit using GPS measurements and the on-board autonomous determination of the attitude using data from the star tracker, digital Sun sensor and magnetometers. The navigation function also includes the prediction for all the mission related orbital events (eclipses, next Earth target passages, next ground station flybys, Earth exclusion angle etc…).
- Guidance (GDC) which consists in the onboard autonomous generation of the commanded reference attitude profiles and
manoeuvres, depending on the spacecraft operational mode. The guidance function also includes the computation of the control error, the difference between the desired and the current, estimated, dynamical state.
- Control (CTL) which consists in the determination and execution of the necessary control commands that will bring the current
dynamical state of the spacecraft coincident with the desired state. The control function also includes the maintenance of internal dynamic variables within specified boundaries (e.g. reaction wheel speed).
- Failure Detection & Identification (FDI) which consists in monitoring the inputs, the internal
and output variables and parameters of the AOCS software to test them for numerical and/or physical validity. Furthermore, to increase the pointing accuracy of the SWAP instrument, the AOCS SW also provides inflight compensation of thermo-elastic misalignments of the star tracker relative to the instrument.
The orbital information allows pointing of the spacecraft towards any point on Earth (by using as well
The PROBA 2 operational modes for the ACNS are as follows:
- The Bdot mode (safe mode): uses the Earth’s magnetic field to reduce angular rates after separation and also
as a safe mode during the mission. It ensures that the solar arrays on the deployed panels remain roughly pointed towards the Sun.
- The magnetic mode (experimental): uses only the magnetic field to point the desired payload toward a desired target.
- The inertial mode controls the spacecraft attitude with respect to the inertial frame.
- The Sun mode controls the spacecraft attitude with respect to the Sun frame with a stability of 1 arcsec/60s. As part of this mode, four large manoeuvres are performed to maximise the Earth Exclusion Angle (EEA) of the star sensor while still pointing to the Sun. This mode is the
main observation mode of the mission.
- The Orbital mode controls the spacecraft attitude with respect to the orbital frame (for nadir pointing).
- The Flight mode controls the spacecraft attitude with respect to the orbital velocity, to execute propulsion manoeuvres.
- The Earth target mode controls the spacecraft attitude so that it points to a target on Earth.
2.1.3. Avionics The avionics is composed by: (i) a high-performance redundant central computer (ADPMS, which provides part of the power subsystem as well, see below) responsible for spacecraft telemetry and part of the science data, all spacecraft computing tasks, some science data processing tasks and interfaces to every unit of the spacecraft; (ii) a mass memory unit, incorporated within ADPMS, responsible to store all the SWAP instrument science data; (iii) a redundant set of S-Band receivers and transmitters.
2.1.3.1. ADPMS data handling system
The PROBA 2 data handling, storage and processing system (ADPMS, Advanced Data and Power Management System) is highly centralised in a single, redundant, high-performance computing unit, based on the radiation hard LEON2-FT processor. It was developed by Verhaert Space under a separate ESA contract. See [1] for detailed information on the ADPMS development. This unit provides sufficient computing power to perform not only the traditional attitude control and data handling tasks, but also spacecraft autonomy as well as instrument data processing (image analysis and compression).
In order to achieve considerable reduction in power consumption, mass and volume, while maintaining or improving computing performance, modularity and testability, the data handling system design has introduced some drastic changes in the design:
- Replacement of various high consuming peripheral SRAM FIFO devices by the extensive usage of Direct Memory Access.
- Removing some hardware components and moving their functionality into software (e.g. part of the telecommand decoder).
- Selection of a backbone bus that combines high throughput with minimum consumption.
- Usage of low power, low voltage components.
- Extensive utilisation of surface mount technology.
- Replacement of various small FPGA's by one large FPGA on each board.
Furthermore, the unit implements a series of wellproven and fully documented existing industrial specifications for its mechanical (Compact PCI boards with small 3U format), electrical (AMBA AHB bus) and software design, ensuring good compatibility between modules during integration and testing. ADPMS is specifically configured for the PROBA 2 spacecraft and a separation detection system has been added, which keeps the spacecraft powered off while it is mated with the launch vehicle and powers it up at detection of separation. ADPMS communicates with the other PROBA 2 units by means of serial UART interfaces, digital in- and outputs, analogue inputs, digital pulse, clock and datation lines. ADPMS furthermore provides a series of telecommand decoders supporting the COP-1 packet telecommanding and direct (MAP-0) ground commands as well as telemetry generators supporting up to 5 Virtual Channels.
2.1.3.2. Mass memory unit
A redundant module, called the MCPM (Memory, compression and packetisation module), to collect and store image data from the SWAP instrument is integrated in the primary and redundant ADPMS as Compact PCI boards. 4 Gbit of memory is available for useful data (protected against SEU) per board and is accessible to the ADPMS LEON processor, which uses spare processing capacity to analyse and compress the acquired images. The processed images are stored in the MCPM memory until downlinked through the telemetry system via a dedicated virtual channel. The memory is provided by a SDRAM memory array.
2.1.3.3. TT&C The S-band link capacities are 64 Kbit/s for packet telecommanding and a maximum of 1 Mb/s for the packet telemetry. SPL-PCM directly phase-modulated on the carrier is used for the uplink and BPSK for the downlink. Slightly modified off-the-shelf units have been used for TT&C support. The antenna configuration has been designed to maintain contact during the ground station passes without switching whilst keeping the spacecraft Sun-pointed, both for commanding and telemetry.
2.1.4. Power subsystem The basic power consumption of the platform is 34 - 48W (depending on the mode). The excess of power will be allocated to the payloads. In Sun-pointing mode, outside eclipse, the solar arrays can generate a power of more than 110 W (end of life). The solar arrays are built with 40x80 mm² triple junctions Ga-As cells with integral diode. The cells are mounted on two deployable solar panels, which are used during most nominal mission phases and on one body mounted panel for contingency situations. The 16.5 Ah Li-ion battery will be used mainly in eclipse and during specific technology experiments with peak power higher than the power available from the solar arrays. It is built from SAFT cells and PROBA 2 will act as the first in-orbit qualification for these cells.
The PROBA 2 power conditioning and distribution system is based on the effective utilisation of this Lithium-ion battery. While the battery technology was successfully proven in orbit for LEO by PROBA 1, the PROBA 2 power subsystem optimizes the power conditioning and distribution for this specific type of battery. A much simpler charge- and discharge regulation compared to that needed for Nickel- Cadmium batteries has considerably reduced the required size for the power conditioning system. Furthermore, taking into account that all connected units and payloads can withstand certain variations in the incoming power, the regulated 28V power bus used on PROBA 1 was replaced by a battery regulated bus. Both simplifications have reduced the size and dissipation of the system sufficiently to allow integration of these power functions with the digital functions of the data handling system into a single box. Hence ADPMS (advanced data and power management system).
2.1.5. Onboard software The PROBA 2 onboard software running on ADPMS can be divided in 3 domains: (i) the mission dependant domain, (ii) the mission independent domain and (iii) the platform domain. It’s overall architecture is based on the PROBA 1 and SMART onboard software and for the mission independent domain considerable re-use from both missions has been achieved. The mission dependant domain functionalities concern the main objectives of the mission (earth observation, solar observation, etc.). They relate to the general spacecraft subsystem management and to the payload management. These are the on-board Applications. Despite the different nature of the management of the instruments (PROBA 1 with its target based Earth observation instruments versus PROBA 2 with its Sunobserving instruments operating almost continuously), the PROBA 2 application managers implement a similar level of onboard autonomy. The main target is to limit the need for ground commanding during nominal and routine mission operations and to ensure effective failure detection, isolation and recovery.
The mission independent domain functionalities provide general purpose services such as the on-board data handling. They are generally common for different missions, and we therefore refer to them as the Generic Services. It is in this domain that maximum re-use has been achieved from previous missions, while modifications were aimed at bringing the functionality further in line with ESA’s Packet Utilisation Standard. Additional features include support for onboard procedures and safe in-flight software modification support, as such providing more flexibility towards the control of the in-orbit technology demonstrations.
The platform dependent domain functionalities provide low level services such as the operating system and hardware access (kernel software). This domain has been re-developed for the ADPMS hardware, utilizing to a maximum extent the functionality provided by the hardware.
The onboard software incorporates as well the LYRA and SWAP instrument data managers which process and compress the LYRA and SWAP science data, optimizing as such the scientific mission return. Validation of the complete onboard software is supported by a Software Validation Facility (SVF), running on a PC platform and specifically developed to simulate the PROBA 2 hardware. This approach was successfully applied for the PROBA 1 onboard software validation.
2.2. PROBA 2 payloads
The following sections provide an overview of the scientific and technology experiments that were selected to fly onboard PROBA 2. The scientific payloads can be grouped in two groups: one set of complementary Sun observation instruments (LYRA and SWAP) and one set of plasma measurement units (TPMU and DSLP).
2.2.1 Scientific payloads
=2.2.1.1 Sun Watcher using APS detectors and image =
Processing (SWAP) SWAP is an extreme ultraviolet (EUV) telescope that will provide images of the solar corona at a temperature of roughly 1 million degrees. The instrument is entirely developed and tested in Belgium under the supervision of the Centre Spatial de Liège for the Royal Observatory of Belgium. SWAP builds upon the heritage of the Extreme ultraviolet Imaging Telescope (EIT) onboard SOHO. It will continue the systematic coronal mass ejection watch program with an improved image sampling rate (1 image every minute instead of every 15 minutes). The spatial resolution of SWAP is complementary to the high temporal resolution of LYRA (see below).
SWAP will demonstrate various improvements over the old EIT design. It is an off-axis Ritchey-Chretien telescope which allows for simpler baffling and a smaller aperture. Instead of using classical CCD technology, the SWAP images are focused on a new CMOS-APS detector, covered with an EUV sensitive scintillation layer.
Onboard processing of the SWAP images will be demonstrated, increasing the science data return through the limited bandwidth downlink by near loss-less image compression and prioritising the images based on their contents. It also supports automated detection of space weather events such as flares, EIT waves, prominence and filament eruptions. The SWAP instrument will make use of the PROBA 2 platform agility (the automatic paving manoeuvres) to effectively increase its field of view when needed (up to 3 times the sun radius) allowing autonomous flare tracking up to 3 times the sun radius.
File:PROBA2 Auto1F.jpeg? Figure 7 Open view of the main components of SWAP and SWAP Flight Model (image courtesy AMOS S.A.)
=2.2.1.2 Lyman Alpha Radiometer (LYRA) =
LYRA is a solar UV radiometer manufactured by a Belgian-Swiss-German consortium including the Royal Observatory of Belgium, the Centre Spatiale de Liege, and the World Radiation Centre in Davos. It will monitor the solar radiantion in four UV bands. The channels have been chosen for their relevance to Solar Physics, Aeronomy, and Space Weather: 115-125 nm (Lyman-alpha); the 200-220 nm Herzberg continuum range; 17-31 nm Aluminium filter channel including Helium II at 30.4 nm; and 1-20 nm Zirconium filter channel. The radiometric calibration will be traceable to synchrotron source standards and the stability will be monitored by on-board calibration sources (VIS & NUV LEDs), which allow distinguishing between possible degradations of the detectors and filters. LYRA will benefit from wide bandgap detectors based on diamond. Diamond sensors make the instrument radiation-hard. LYRA demonstrates technologies important for future missions such as the ESA Solar Orbiter. The instrument has an acquisition cadence up to 100Hz.
=2.2.1.3 Thermal Plasma Measurement Unit (TPMU) =
The Thermal Plasma Measurement Unit comprises a Sensor Block, which consist of probes and preamplifiers, and a Processing Block. TPMU contains 3 experiments which measure the total ion density and electron temperature, the ion composition and ion temperature, and the floating potential of the satellite body.
For further info PROBA-2 MISSION AND NEW TECHNOLOGIES OVERVIEW
RetroReflector? Array (RRA) Characteristics:
PROBA-2 will use the same retroreflector package as was installed on Cryosat-1. More information about the retroreflector characteristics can be found in the document "CryoSat?-LRR-01 Laser Retro Reflector Technical Description" (V. Shargorodsky/2002). PROBA-2 Retroreflector Information Form (29 August 2008, PDF):
(from http://ilrs.gsfc.nasa.gov/satellite_missions/ilrssupretro.html) Satellite name Name: PROBA-2
Contact for retroreflector information: Stefano Santandrea, ESA/ESTEC Phone number: +31 (71) 565-4407 E-mail address: stefano.santandrea @ esa.int
A prerequisite for accurate reduction of laser range observations is a complete set of pre-launch parameters that define the characteristics and location of the LRA on the satellite. The set of parameters should include a general description of the array, including references to any ground-tests that may have been carried out, array manufacturer and whether the array type has been used in previous satellite missions. So the following information is requested.
- Array type (spherical, hexagonal, planar, etc.), to include a diagram or photograph: 7 reflectors (1 central and 6 lateral in a circular arrangement) mounted on a flattened cone. See picture for further details.
- Array manufacturer: Scientific Research Institute for Precision Instruments, Moscow
- Link (URL or reference) to any ground-tests that were carried out on the array:
- Other missions using this LRA design and/or type of cubes: CryoSat?-1/2, GOCE
For accurate orbital analysis it is essential that full information is available in order that a model of the 3-dimensional position of the satellite centre of mass may be referred to the location in space at which the laser range measurements are made. To achieve this, the 3-D location of the LRA phase centre must be specified in a satellite fixed reference frame with respect to the satellite's mass centre. In practice this means that the following parameters must be available at mm accuracy or better.
- 3-D location (possibly time-dependent) of the satellite's mass centre relative to a satellite-based origin:
Spacecraft CoM (X,Y,Z) = (-0.0160m,-0.0060m,+0.3810m)
- 3-D location of the phase centre of the LRA relative to a satellite-based origin:
LRA CoM (X,Y,Z) = (+0.2085m,-0.2390m,+0.0102m), LRA MSC (X,Y,Z) = (+0.2085m,-0.2390m,+0.0300m) Note: the LRA center-of-mass is offset by 19.8 mm from the reference point (= mounting surface center, MSC) along the boresight of the central reflector. The range finding correction relative to the mounting surface center amounts to +19+/-6 mm, and depends on the angle of position and the spacecraft bearing relative to station SLR, and shall be added to the measured range.
However, in order to achieve (6) if it is not directly specified (the ideal case) by the satellite manufacturer, and as an independent check, the following information must be supplied prior to launch.
- Position and orientation of the LRA reference point (LRA mass-centre or marker on LRA assembly) relative to a satellite-based origin:
- Position (xyz) of the centre of the front face of each corner cube within the LRA assembly, with respect to the LRA reference point and including information of amount of recession of front faces of cubes:
(dX,dY,dZ)_0 = (+0.000m,-0.000m,-0.0480m) (dX,dY,dZ)_i = ( +0.0455*cos(p/3*(i-1)),-0.0455*sin(p/3*(i-1)),-0.0285m), i=1,...,6
- Orientation of each cube within the LRA assembly (three angles for each cube): See design drawing.
- Shape and size of each corner cube, especially the height:
- Material from which the cubes are manufactured (e.g. quartz): fused silica with aluminium-coated reflecting prism faces
- Refractive index of the cube material, as a function of wavelength ? (micron):
- Dihedral angle offset(s) and manufacturing tolerance:
- Radius of curvature of front surfaces of cubes, if applicable:
- Flatness of cubes' surfaces (as a fraction of wavelength):
- Whether or not the cubes are coated and with what material:
Proba2 Station DATA
timespan is October 1, 2010 through September 30, 2011 You can find the station data here
RTEMS - part of the ESA
RTEMS validation and tools Saab Space AB performed a validation of the real-time operating system RTEMS. Since it is available for many different targets and includes a multitude of functionality, ranging from I/O drivers to file-systems and beyond, it was agreed to only focus on the parts that were applicable for European space community applications. This implied that only the ERC32 target and a limited sub-set of the configurable RTEMS managers had to be considered.
Subsequently, Edisoft has reached an agreement with OAR to implement an RTEMS maintenance centre (see related link) in Europe. Edisoft has complemented the validation and the toolset associated with RTEMS for the specific needs of the European space industry. Gaisler Research also provides services based around RTEMS on ERC32 and Leon.
RTEMS has already been used in several space applications, in particular FedSat? (a scientific Research and Development microsatellite), the Surrey's Solid State Data Recorder (a component used in the Disaster Monitoring Constellation), ChipSat? (a System-on-Chip architecture), the Electra UHF antenna of the Mars Reconnaissance Orbiter and in the Galileo GIOVE-A and Herschel-Planck satellites.
Providing flight opportunities
The Proba satellites are part of ESA’s In orbit Technology Demonstration Programme: missions dedicated to the demonstration of innovative technologies. In orbit demonstration is the last step on the technology development ladder. New technology products need to be demonstrated in orbit, particularly when users require evidence of flight heritage or when there is a high risk associated with use of the new technology. In orbit demonstration is achieved through experiments on carriers of opportunity, e.g. the International Space Station, or through dedicated small satellites such as the Proba series, which were created to increase the availability of flight-testing opportunities.
Ensuring a competitive European industry
Small, low-cost missions allow small companies access to space and provide them with the experience that is essential for European industries to be competitive and innovative.
Commitment to technological innovation
Proba-2 is the result of ESA’s commitment to technological innovation. Altogether, 17 new technological developments and four scientific experiments are being flown on Proba-2.
Technology demonstrations
The technology demonstrations are:
- a new type of lithium-ion battery, developed by SAFT (FR)
- an advanced data and power management system, containing many new component technologies including the LEON processor developed by Verhaert Space (BE)
- combined carbon-fibre and aluminium structural panels, developed by Apco Technologies SA (CH)
- new models of reaction wheels from Dynacon (CA), startrackers from DTU (DK) and GPS receivers from DLR (DE)
- an upgraded telecommand system with a decoder largely implemented in software by STT- SystemTechnik? GmbH (DE)
- a digital Sun-sensor, developed by TNO (NL)
- a dual-frequency GPS receiver, developed by Alcatel Espace (FR)
- a fibre-sensor system for monitoring temperatures and pressures around the satellite, developed by MPB Communications Inc. (CA)
- a new startracker development being test-flown before use on the BepiColombo? mission, developed by Galileo Avionica (IT)
- a very high-precision flux-gate magnetometer, developed by DTU (DK)
- an experimental solar panel with a solar flux concentrator, developed by CSL (BE)
- a xenon gas propulsion system using resistojet thrusters and a solid-state nitrogen gas generator to pressurise the propellant tanks, developed by SSTL (GB) and Bradford (NL)
- an exploration micro-camera (X-CAM), developed by Micro-cameras & Space Exploration (CH)
- new GNC algorithms developed by NGC (CA)
The two solar observation experiments are:
- a Large Yield Radiometer (LYRA) that will monitor four bands in a very wide ultraviolet spectrum, with Centre Spatial de Liège as lead institute supported by the Royal Observatory of Belgium as scientific leader and with an international team comprising PMOD (CH), IMOMEC (BE) and BISA (BE)
- an extreme-ultraviolet telescope (SWAP) using new pixel sensor technology (APS), that will make measurements of the solar corona in a very narrow band, with Centre Spatial de Liège as lead institute supported by the Royal Observatory of Belgium and with an industrial team comprising Alcatel-Lucent (BE), AMOS SA (BE), DELTATEC (BE), Fill
Factory NV (BE) and OIP NV (BE)
The two space weather experiments are:
- Dual Segmented Langmuir Probes (DSLP), which will measure electron density and temperature in the background plasma of the Earth’s magnetosphere
- a thermal plasma measurement unit (TPMU), that will measure ion densities and composition
Both were developed by a Czech consortium, led by the Institute of Atmospheric Physics, Academy of Sciences of the Czech Republic (CZ).
In total, ten European countries and Canada were involved in the construction of the Proba-2 satellite.
Effective Engineering
To ensure on board autonomy, mission control system development is an integral part of the overall mission programme, along with the associated operations. Development occurs incrementally, with progressive validation taking place throughout activities ranging from software development, spacecraft integration and system testing to in-orbit operations.
PROBA-V (Project for On-Board Autonomy - Vegetation)
The PROBA-V (Vegetation) mission definition is an attempt, spearheaded by ESA and CNES, to accommodate an improved smaller version of the large VGT (Vegetation) optical instrument of SPOT-4 and SPOT-5 mission heritage on a small satellite bus, such as the one of PROBA-2.
As of 2008, small satellite technologies have reached a level of maturity and reliability to be used as a platform for an operational Earth observation mission. Furthermore, advancements in the techniques of detectors, optics fabrication and metrology are considered sufficiently mature to permit the design of a compact multispectral optical instrument. 1) 2) 3) 4) 5) 6) 7) 8) 9) 10)
The C/D Phase started in July 2010. The system CDR (Critical Design Review) took place in the spring of 2011. The acceptance review is planned for Dec. 2011 and the flight acceptance review is planned for the spring of 2012.. ESA is responsible for the overall mission, the technological payloads and for the launcher selection.
Background: The VGT instruments (VGT1 & VGT2), each with a mass of ~160 kg and fairly large size, have provided the user community with almost daily global observations of continental surfaces at a resolution of 1.15 km on a swath of ~2200 km. The instruments VGT1 on SPOT-4 (launch March 24, 1998) and VGT2 on SPOT-5 (launch May 4, 2002) are quasi similar optical instruments operating in the VNIR (3 bands) and SWIR (1 band) range.
The Vegetation instruments were jointly developed and funded by France, Belgium, Italy, Sweden, and the EC (European Commission). The consortium of CNES, BelSPO (Federal Public Planning Service Science Policy), SNSB (Swedish National Space Board) and VITO (Flemish Institute for Technological Research) is providing the user segment services (data processing, archiving, distribution). Vegetation principally addresses key observations in the following application domains:
- General land use in relation to vegetation cover and its changes
- Vegetation behavior to strong meteorological events (severe droughts) and climate changes (long-term behavior of the vegetation cover)
- Disaster management (detection of fires and surface water bodies)
- Biophysical parameters for model input devoted to water budgets and primary productivity (agriculture, ecosystem vulnerability, etc.).
As of 2008, a Vegetation archive of 10 years of consistent global data sets has been established permitting researchers access on a long-term basis. The SPOT-5 operational lifetime is estimated to expire in 2012. Pleiades, the next French satellite for Earth Observation, is solely dedicated to high-resolution imaging (on a fairly narrow swath) and will not embark any instrument providing vegetation data.
Since the SPOT series spacecraft will not be continued and the SPOT-5 spacecraft will eventually fail — there is of course a great interest in the EO user community to the Vegetation observation in the context of a smaller mission, affordable to all concerned. 11)
PROBA-V will continue the production of Vegetation products exploiting advanced small satellite technology. However, this implies in particular a redesign of the Vegetation payload into a much smaller unit to be able to accommodate it onto the PROBA bus.
Overview of key requirements of the PROBA-V mission - and some improvements compared to SPOT/Vegetation:
- Data and service continuity: filling the gap between SPOT-VGT and the Sentinel-3 mission
- Spectral and radiometric performance identical to VGT
- GSD: 1 km mandatory, improved GSD is highly disirable: 300 m (VNIR bands), 600 m (SWIR band). Image quality and geometric accuracy, equal to or better than SPOT-VGT
- Provision of daily global coverage of the land masses in the latitudes 35º and 75º North and in the latitudes between 35° and 56° South, with a 90% daily coverage of equatorial zones - and 100% two-daily imaging, during day time, of the land masses in the latitudes between 35º North and 35º South..
File:ProbaV Auto12.jpeg? Figure 1: Artist's view of the PROBA-V spacecraft (image credit: ESA) 12) 13)
An extensive feasibility study and trade-off work was undertaken to identify a solution that could meet not only the technical challenges, but that could also be developed and tested within a tight budget of a small satellite mission.
The PROBA-V project of ESA includes the Space Segment (platform contract award to QinetiQ Space NV of Kruibeke, Belgium - formerly Verhaert), the Mission Control Center (Redu, Belgium) and the User Segment (data processing facility) at VITO NV. VITO (Vlaamse instelling voor technologisch onderzoek - Flemish Institute for Technological Research) is located in northern Belgium. VITO’s processing center of VGT1 and 2 data (SPOT-4 and SPOT-5) is operational since 1999. VITO is also the prime investigator and data service provider of PROBA-V for the user community including product quality control. 14)
Implementation schedule:
- The Phase B of the project started in January 2009
- SRR (System Requirements Review) is in Q4 of 2009
- PDR (Preliminary Design Review) in Q2 of 2010
- HMA (Heterogeneous Mission Access) and QA4EO (Quality Assurance for Earth Observation) implementation for user data. Planned interoperability with GSCDA V2 (GMES Space Component Data Access Version 2).
File:ProbaV Auto11.jpeg? Figure 2: PROBA-V project organization (image credit: ESA, Ref. 9)
Spacecraft:
An industrial team, led by QinetiQ Space NV (Belgium), is supported by several European subcontractors and suppliers, and is responsible for the development of the flight satellite platform, the vegetation payload and the Ground Segment.
The spacecraft bus (fully redundant) is of heritage from the PROBA-1 and PROBA-2 missions (structure, avionics, AOCS, OBS with minor modifications). The PROBA-V spacecraft has a total mass of ~160 kg, and a volume of 80 cm x 80 cm x 100 cm. The three-axis stabilized platform is designed for a mission lifetime of 2.5 years (Ref. 7). 15)
The spacecraft resources management is built around ADPMS (Advanced Data and Power Management System), which is currently flying on PROBA-2. The data handling part of ADPMS is partitioned using compact PCI modules. A cold redundant mass memory module of 16 Gbit is foreseen for PROBA-V. The newly developed mass memory will use NAND flash technology.
The power distribution and conditioning part of ADPMS supplies an unregulated bus, with each equipment having its internal DC/DC converter. The power conditioning system is designed around a Li-ion battery.
File:ProbaV Auto10.jpeg? Figure 3: PROBA-V spacecraft accommodation (image credit: QinetiQ Space)
AOCS (Attitude and Orbit Control Subsystem) provides three-axis attitude control including high accuracy pointing and maneuvering in different spacecraft attitude modes. The AOCS SW is an extension of the one of PROBA-2, including the following algorithms required by the on-board autonomous mission and payload management: 16)
- Prediction of land/sea transitions using a land sea mask to reduce the amount of data generated
- Optimization of attitude in Sun Bathing mode to enhance incoming power while avoiding star tracker blinding
- Momentum dumping without zero wheel speed crossings during imaging
- Estimations of remaining spacecraft magnetic dipole to reduce pointing error
- Autonomous avoidance of star tracker Earth/Sun? blinding
- Inertial mode with fixed scanning rate for moon calibration.
The AOCS hardware selection for PROBA-V consists of a high accuracy double star tracker head, a set of reaction wheels, magnetotorquers, magnetometers and a GPS receiver.
The main AOCS modes are: Safe, Geodetic, Sun Bathing and Inertial mode.
- The satellite Safe mode is used to detumble the spacecraft after separation from the launcher and it will be used to recover from spacecraft anomalies.
- The Geodetic mode is used during nominal observation of the Earth’s vegetation. In this mode the payload is pointed towards the geodetic normal to the Earth’s surface. An extra steering compensation, yaw-steering, is added in this mode, to minimize the image distortion caused by the rotation of the Earth. This yaw-steering maneuver ensures that the spectral imagers are oriented such that the lines of pixels are perpendicular to the ground-trace at each moment. In this mode the star trackers and the GPS receiver are used as sensors and the reaction wheels as actuators.
- On each orbit, the spacecraft enters the Sun Bathing mode from -56º latitude until entry of eclipse. This is to enhance the incoming power.
- The Inertial mode coupled with an inertial scanning of the Moon at a fixed rate is used for monthly radiometric full moon instrument calibration purposes. The pointing towards the moon takes 2.5 min, 9 min for scanning the moon and 2.5 min to return to nominal observation mode. It is sufficient to have the moon in the FOV of the SI (Spectral Imager) for a number of pixels.
Beyond the technology demonstration through the PROBA program, it is also noted that the AOCS software technology developed in the course of this program is now the baseline of the AOCS of a major operational mission of the GMES (Global Monitoring for Environment and Security) program: Sentinel-3. NGC Aerospace Ltd (NGC) of Sherbrooke, (Québec), Canada was responsible for the design, implementation and validation of the autonomous GNC (Guidance, Navigation and Control) algorithms implemented as part of the AOCS software of PROBA-1 and PROBA-2. NGC has the same responsibilities for the PROBA-V mission (Ref. 16).
EPS (Electric Power Subsystem): The PVA (Photo-Voltaic Array) uses GaAs? triple junction cells with an of efficiency of 28%. To obtain the operating voltage of 31.5 V, 18 cells are included in each string in series with a blocking diode. The PVA consists of a total of 25 solar strings taken into account the loss of one string on the most contributing PVA panel. The average solar string power under EOL conditions (summer solstice and T = 40°C) yields 12.8 W. The maximal incoming power at EOL during an orbit is 144 W. The energy budget for PROBA-V is derived for a bus power consumption of 140 W assuming a worst case day in the summer and while not taken into account the effect of albedo. A worst case power budget analysis indicated a maximum capacity discharge of 1.66 Ah. Use of a Li-ion battery. The battery cells provide a capacity of 1.5 Ah per string. The PROBA-V battery is sized to 12 Ah taking into account capacity fading and loss of a string.
Launch: A launch of the PROBA-V spacecraft as a secondary payload is planned for Q4 2012. The primary launcher is currently assumed to be Vega with the VESTA adapter.
Orbit: Sun-synchronous orbit, altitude = 820 km, inclination = 98.8º, LTDN (Local Time on Descending Node) = 10:30 hours (with a drift limited between 10:30 and 11:30 AM during the mission lifetime).
RF communications: S-band for TT&C transmissions and low-gain antennas with omni-directional up- and downlink capability. The uplink symbol rate will be fixed at 64 ks/s, while the downlink can be set to a high rate (< 2 Ms/s) for nominal imaging or to a low rate at 329 ks/s for off-nominal conditions. The CCSDS protocol is used for the TT&C transmissions.
X-band downlink of payload data is in X-band at a data rate of 35 Mbit/s. The onboard mass memory is 88 Gbit. The Redu station (Belgium) is being used for TT&C communication services. The X-band uses two cold redundant high-rate X-band transmitters and two nadir pointing isoflux antennas, both RHCP.
The S-band transceivers will be connected to RS422 outputs (cross strapped) of ADPMS while the X-band transmitters (8090 MHz) will be connected to the LVDS outputs not cross-strapped. The X-band link budget results in a link margin of 6 dB which will allow a reduction of the RF output power. Therefore the X-band transmitter will be designed (customer furnished item) to support various output power settings such that after commissioning, a lower output power might be selected.
Data compression: The massive amount of data produced by the instrument is beyond the capabilities of the bandwidth available on board of a small satellite. Data are reduced by using a lossless data compression algorithm implemented in a specific electronics. The data compression ratio obtained using standard CCSDS compression algorithms (CCSDS 133.0 B-1) is shown in Table 2.
Spectral band
Compression ratio
Blue 10.8
Red 7.2
NIR 5.4
SWIR 2
Table 2: Overview of compression rates
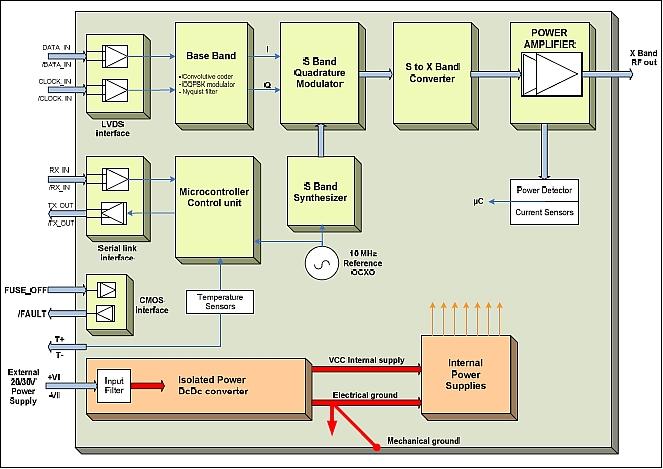
The selection of an S-band transceiver and the development of an innovative and generic X-band transmitter for small satellites has been initiated in a collaborative program between CNES and ESA and is funded under GSTP-5 (General Support Technology Program-5). The X-band transmitter is a high-performance device optimized for the needs and constraints of small platforms for which small volume, low mass, low power consumption, and low cost cost are important parameters. Moreover, some key features such as modulation (filtered Offset-QSK), coding scheme (convolutional 7 ½), data and clock interfaces (LVDS packet wire serial interface) have been selected in compliance with CCSDS recommendations, but also to ease the interoperability with most of the existing on-board computers and ground station demodulators. 17)
The development of the new X-band transmitter is based almost exclusively on COTS components to achieve at the same time high performances and low recurrent cost. The transmitter also features an innovative functionality with an on-board programmable RF output power from 1-10 W which allows to match finely with the chosen bit rate, and to reduce as much as possible the margins of the link budget and therefore the consumption power. PROBA-V is the first mission to use this newly developed transmitter. The transmitter has a mass of 1 kg, a size of 160 mm x 115 mm x 46 mm, an in-orbit life time of 5 years, and a radiation hardness of 10 krad. Data rates from 10-100 Mbit/s are available. The X-band transmitter was manufactured by TES Electonic Solutions of Bruz, France. 18)
File:ProbaV AutoF.jpeg?? Figure 4: Overview of the transmitter architecture (CNES, TES)
File:ProbaV AutoE.jpeg? Figure 5: Photo of the X-band transmitter (image credit: CNES, ESA)
For further info PROBA-V (Project for On-Board Autonomy - Vegetation)
External links
- Official Page
- ESA Proba1
- PROBA-2 MISSION AND NEW TECHNOLOGIES OVERVIEW
- Autonomous and Precise Navigation of the PROBA-2 Spacecraft
- Factsheet
- PROBA-V (Project for On-Board Autonomy - Vegetation)
- NEWS about Proba2
- ESA
- Technical Information for PROBA-2 Laser Tracking Support
- Station Data
- RTEMS Improvement – Space Qualification of RTEMS
- Esa's Proba-2 demonstration satellite views eclipse
- ESA Operating Systems
Attachments (10)
- Proba-2-in-orbit-rear-view.jpg (107.4 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:01:17.
- PROBA2_Auto1F.jpeg (42.2 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:01:26.
- PROBA2_Auto2.jpeg (17.1 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:01:36.
- PROBA2_Auto14.jpeg (41.2 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:01:52.
- ProbaV_Auto10.jpeg (49.0 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:02:07.
- PROBA2_Auto11.jpeg (56.3 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:02:18.
- ProbaV_AutoF.jpeg (56.7 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:04:58.
- ProbaV_Auto11.jpeg (57.8 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:05:21.
- ProbaV_AutoE.jpeg (9.8 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:05:35.
- ProbaV_Auto12.jpeg (28.2 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:05:51.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip