| Version 16 (modified by Iliyankatsarski, on 11/29/11 at 21:03:15) (diff) |
|---|
Proba 2
ESA Proba-2
Proba-2, Proba stands for PRoject for OnBoard? Autonomy. The Proba satellites are among the smallest spacecraft ever to be flown by ESA, but they are making a big impact in the field of space technology. Proba-2 is the second of the series, building on nearly eight years of successful Proba-1 experience.
PROBA 2 MISSION SUMMARY
Following on from the success of PROBA-1, which successfully completed its technological goals in its first year of flight and continues to provide valuable scientific data now into its fifth operational year, PROBA-2, now in phase C/D and due for launch in September 2007, will once again fly a suite of new technology demonstrators with an ‘added value’ science package of four experiments. Altogether there are seventeen new developments being flown on Proba-2, divided into two groups: platform technologies which are part of the infrastructure and are mission critical and passenger technologies to gain flight heritage and experience before committing them to the infrastructure of other missions. Of the four Science experiments, two are dedicated to solar physics. The two other will study the space weather (plasma physics) The paper will provide an overview of the PROBA-2 mission and spacecraft along with a description of the scientific payload and technology experiments
1.1. Mission objectives
The PROBA 2 mission objectives, as deduced from the ESA requirements, can be summarized as follows:
- PROBA 2 will be a platform to demonstrate and validate new, advanced technologies in order to promote their usage in future missions,
- As such, PROBA 2 shall accommodate a number of selected technology experiments,
- PROBA 2 shall furthermore accommodate a series of scientific payloads, in the fields of space environment (plasma) and solar observations;
- The PROBA 2 system shall be designed to support an in-orbit operational lifetime of 2 years;
- The PROBA 2 orbit shall be preferably a LEO Sun-synchronous orbit with minimized eclipse time;
- PROBA 2 shall have a high degree of spacecraft autonomy and ground support automation.
1.2. Launch and orbit
PROBA 2 is planned to be launched from Plesetsk, Russia, in September 2007, on a Rockot launcher. PROBA 2 will be a secondary-passenger of the launch of the SMOS (ESA) spacecraft. It will be directly injected in a Sun-synchronous LEO orbit, with an altitude between 700-800 km (baseline 728km) and with the LTAN at 6:00 AM +/- 15 minutes. The orbit injection accuracy provided by the launcher is sufficient to guarantee that the LTAN will remain within 6:00 AM +/- 45 minutes without the use of onboard propulsion. The orbital period is approximately 100 minutes. The targeted orbit is eclipse-free for 9 months per year, thus making the orbit well suited for the solar observing instruments. Maximum eclipse duration during the eclipse season is less than 20 minutes. Since the orbit remains acceptable for the solar observations during the complete mission lifetime, propulsion is not needed to support the mission. However, as is documented below, a propulsion system is accommodated onboard PROBA 2 as a technology demonstration.
1.3. Ground segment
As for PROBA1, the PROBA2 spacecraft will be operated from the Redu Ground station (Belgium).
PROBA 2 SPACE SEGMENT DESCRIPTION
PROBA 2 has a weight of less than 130 kg and belongs to the class of the mini-satellites (Figure 1). Its structure is built using aluminum and CFRP honeycomb panels. Triple junction Gallium Arsenide solar cells, body mounted on 1 panel and mounted on 2 deployable panels, provide the power to the spacecraft and a Li-Ion battery is used for energy storage. A battery-regulated, centrally switched 28V bus distributes the power to the units and the instruments. A high performance computer, based on the LEON processor provides the computing power to the platform and for instrument data processing. It accommodates the memory for house-keeping data storage as well as a mass memory for the payload image data. The telecommunications subsystem is designed to establish and maintain spaceground communications link with the ground segment while the spacecraft remains sun-pointing. It is CCSDS compatible for up- and downlink in the S-band. The set of ACNS units support Sun-pointing, inertial 3-axis attitude pointing as well as Earth pointing and a series of attitude maneuvers. Furthermore, it performs all required navigation and maneuvering computations onboard. The spacecraft platform provides full redundancy
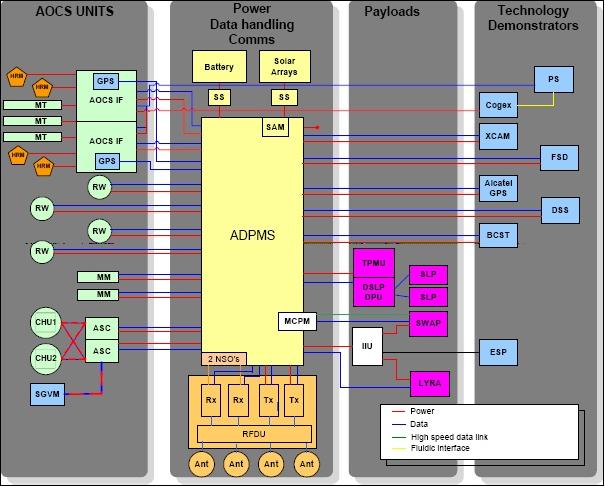
File:PROBA2 Auto11.jpeg? PROBA 2 block diagram
2.1. PROBA 2 platform
2.1.1. Mechanical and thermal
The PROBA 2 structure is derived from the PROBA 1 structure and is compatible with launchers such as ROCKOT, PSLV and DNEPR. The carrying part of the structure is composed of 3 aluminum honeycomb panels mounted in an H-structure and a bottom board. Almost all units are mounted on these inner panels. The bottom board acts as the interface with the launcher. All outer panels without solar cells mounted on them consist of aluminum honeycomb panels as well. They are painted black/white according to the needs of the thermal subsystem. The 2 deployable solar panels, as well as one outer panel with solar cells consist of honeycomb panels with aluminum core and CFRP sheets. The sheets supporting the solar cells are covered with kapton for electrical insulation. The deployable panels are permanently connected to the spacecraft body by hinges based on Carpentier joints. The Carpentier joints provide the opening torque at the moment of panel release as well as the self-locking in the deployed position. During launch, the stowed panels are kept in the stowed condition by the hold-down and release mechanism. This mechanism utilizes thermal knives to release each panel by software command in orbit.
The thermal control of the spacecraft is intended to be passive as far as possible. The sun-pointing attitude results however in a considerable thermal gradient through the spacecraft, making as such a completely passive thermal control difficult to achieve and heaters are foreseen to control the battery temperature. Heaters are also required to de-contaminate specific parts of the solar observation instruments. The SWAP instrument (see below) has a radiator mounted on the side of the spacecraft in order to keep the detector as cold as possible.
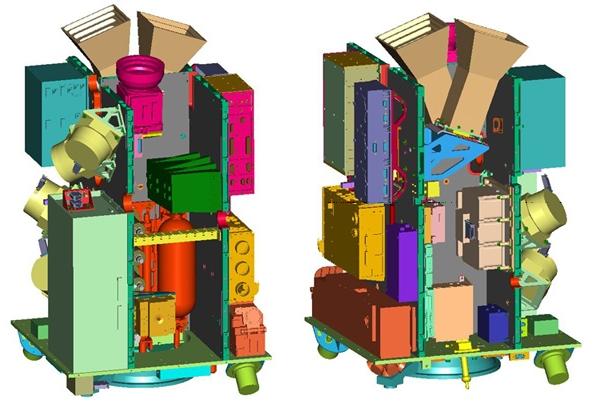
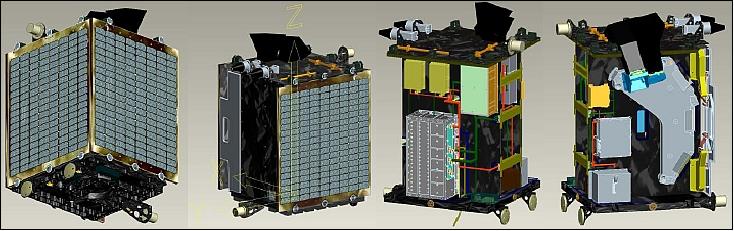
File:PROBA2 Auto14.jpeg? Figure 3 PROBA 2 internal structure and accommodation
2.1.2. Attitude control and Navigation system The PROBA 2 ACNS is strongly based on the PROBA 1 ACNS. The latter was a complex system providing (i) 3-axis attitude control including high accuracy pointing and maneuvering capabilities in different pointing modes, (ii) full spacecraft attitude control based only on target oriented commands and (iii) the demonstration of new technologies. Furthermore, it was developed relying heavily on the use of Computer-Aided Software Engineering tools. The PROBA 2 ACNS includes the full PROBA 1 ACNS, with the additional functionality to support the solar observation mission. This includes an improved Sun-model and the possible inclusion of a sun-sensor in the control loop. Furthermore, the ACNS incorporates a technology demonstration of a series of new algorithms:
- low-cost determination of the attitude and orbit using temperature, light and/or magnetic-field
sensors;
- the use of a Square-Root Unscented Kalman Filter (SR-UKF) for attitude and orbit
determination;
- autonomous, high-precision, recurrent largeangle manoeuvre capability during the Sun-
Observation Mode to avoid star-sensor blinding by the Earth
Finally, the ACNS functions support automatic “image paving” for the Sun-Imaging instrument (SWAP) in order to increase its actual field of view. PROBA 2, as PROBA 1, has been fitted with a highaccuracy double head star tracker, with GPS receiversand with a set of reaction wheels for the nominal ACNS
operation. This set of sensors and actuators is complemented with the magnetotorquers and 3-axis magnetometers. As explained above, PROBA 2 carries as well an additional star tracker, an additional GPS, an additional magnetometer and a Sun Sensor as technology demonstrations.
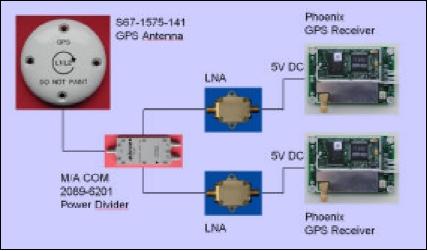
As on PROBA 1, the star tracker is the main attitude determination sensor. It provides full-sky coverage and achieves the high accuracy required for Sun pointing. The sensor can autonomously reconstruct the spacecraft’s inertial attitude starting from a “lost in space” attitude with a performance of a few arc-seconds up to an arc-minute. The attitude can be reconstructed at relatively high inertial rates, which allows the ACNS software to perform gyro-less rate measurements sufficiently accurately to control large-angle precise and stable manoeuvres. The model selected to fly on PROBA 2 is the micro-autonomous stellar compass (m- ASC), a next generation of the star tracker to that flown onboard PROBA 1. It requires less electrical power, has a lower mass and smaller volume, can connect to 4 camera heads instead of to 2 (although only 2 are used in PROBA 2) and provides attitude output at 4 Hz instead of 2 Hz. The star tracker is provided by the Technical University of Denmark. Orbit and time knowledge is acquired autonomously from measurements performed by a GPS receiver. As a technology demonstration, PROBA 2 flies a redundant set of Phoenix GPS receivers provided by DLR.
File:PROBA2 Auto2.jpeg? Phoenix GPS architecture for PROBA-2
It is a miniature receiver specifically designed for high dynamics space applications. It is based on SigTech?’s commercial-off-the-shelf MG5001 receiver board but operates a proprietary firmware developed by DLR. Though originally designed for automotive applications, the receiver board has been qualified for space use in a series of thermal-vacuum, vibration and total ionization dose tests. The receiver employs a GP4020 baseband processor which combines a 12 channel GP2021 correlator and an ARM7TDMI microprocessor kernel. At a power consumption of less than one Watt and a board size of 50 x 70 mm the receiver is among the smallest of its kind and particularly well suited for satellites with limited onboard resources. The Phoenix receiver is extensively used in European sounding rocket missions and has been selected for various other micro-satellite missions in low Earth orbit (LEO) such as X-Sat, ARGO, Flying Laptop and PRISMA. Specific features of the Phoenix receiver software for LEO applications include optimized tracking loops for high accuracy code and carrier tracking, precision timing and integer ambiguities for carrier phase based relative navigation, a twoline elements orbit propagator for signal acquisition aiding, and an attitude interface to account for non-zenith pointing antennas in the channel allocation process. A pulse-per-second signal enables synchronization to GPS (or UTC) time with an accuracy of better than 1ms. Noise levels of 0.4 m (pseudorange) and 0.5 mm (carrier phase) at representative signal conditions (C/N0=45dB-Hz) have been demonstrated in signal simulator and open air tests which render the receiver suitable for precise orbit determination. While the instantaneous (kinematic) navigation solution is restricted to an accuracy of roughly 10m (3D rms) due to broadcast ephemeris errors and unaccounted ionospheric path delays, an accuracy of about 0.5-1m can be achieved in a ground based precise orbit determination.
The orbital information allows pointing of the spacecraft towards any point on Earth (by using as well an onboard Earth-rotation ephemeris calculator), to autonomously determine the optimal moments for a high-angle maneuver to avoid sensor blinding by the Earth and to perform accurate Sun-pointing. The generation of control torques is by means of four reaction wheels (Dynacon, Canada) mounted in a tetrahedron configuration. Their inertia capacity is 0.65 Nms and their maximum torque capacity is 30 mNm. The reaction wheels are an evolution of those used on the Canadian MOST mission.
All ACNS sensors and actuators are controlled by the ACNS software running on the central LEON based computer and provides functions including:
- Navigation (NAV) which consists in the onboard Kalman filter based autonomous
estimation of the orbit using GPS measurements and the on-board autonomous determination of the attitude using data from the star tracker, digital Sun sensor and magnetometers. The navigation function also includes the prediction for all the mission related orbital events (eclipses, next Earth target passages, next ground station flybys, Earth exclusion angle etc…).
- Guidance (GDC) which consists in the onboard autonomous generation of the commanded reference attitude profiles and
manoeuvres, depending on the spacecraft operational mode. The guidance function also includes the computation of the control error, the difference between the desired and the current, estimated, dynamical state.
- Control (CTL) which consists in the determination and execution of the necessary control commands that will bring the current
dynamical state of the spacecraft coincident with the desired state. The control function also includes the maintenance of internal dynamic variables within specified boundaries (e.g. reaction wheel speed).
- Failure Detection & Identification (FDI) which consists in monitoring the inputs, the internal
and output variables and parameters of the AOCS software to test them for numerical and/or physical validity. Furthermore, to increase the pointing accuracy of the SWAP instrument, the AOCS SW also provides inflight compensation of thermo-elastic misalignments of the star tracker relative to the instrument.
Providing flight opportunities
The Proba satellites are part of ESA’s In orbit Technology Demonstration Programme: missions dedicated to the demonstration of innovative technologies. In orbit demonstration is the last step on the technology development ladder. New technology products need to be demonstrated in orbit, particularly when users require evidence of flight heritage or when there is a high risk associated with use of the new technology. In orbit demonstration is achieved through experiments on carriers of opportunity, e.g. the International Space Station, or through dedicated small satellites such as the Proba series, which were created to increase the availability of flight-testing opportunities.
Ensuring a competitive European industry
Small, low-cost missions allow small companies access to space and provide them with the experience that is essential for European industries to be competitive and innovative.
Commitment to technological innovation
Proba-2 is the result of ESA’s commitment to technological innovation. Altogether, 17 new technological developments and four scientific experiments are being flown on Proba-2.
Technology demonstrations
The technology demonstrations are:
- a new type of lithium-ion battery, developed by SAFT (FR)
- an advanced data and power management system, containing many new component technologies including the LEON processor developed by Verhaert Space (BE)
- combined carbon-fibre and aluminium structural panels, developed by Apco Technologies SA (CH)
- new models of reaction wheels from Dynacon (CA), startrackers from DTU (DK) and GPS receivers from DLR (DE)
- an upgraded telecommand system with a decoder largely implemented in software by STT- SystemTechnik? GmbH (DE)
- a digital Sun-sensor, developed by TNO (NL)
- a dual-frequency GPS receiver, developed by Alcatel Espace (FR)
- a fibre-sensor system for monitoring temperatures and pressures around the satellite, developed by MPB Communications Inc. (CA)
- a new startracker development being test-flown before use on the BepiColombo? mission, developed by Galileo Avionica (IT)
- a very high-precision flux-gate magnetometer, developed by DTU (DK)
- an experimental solar panel with a solar flux concentrator, developed by CSL (BE)
- a xenon gas propulsion system using resistojet thrusters and a solid-state nitrogen gas generator to pressurise the propellant tanks, developed by SSTL (GB) and Bradford (NL)
- an exploration micro-camera (X-CAM), developed by Micro-cameras & Space Exploration (CH)
- new GNC algorithms developed by NGC (CA)
The two solar observation experiments are:
- a Large Yield Radiometer (LYRA) that will monitor four bands in a very wide ultraviolet spectrum, with Centre Spatial de Liège as lead institute supported by the Royal Observatory of Belgium as scientific leader and with an international team comprising PMOD (CH), IMOMEC (BE) and BISA (BE)
- an extreme-ultraviolet telescope (SWAP) using new pixel sensor technology (APS), that will make measurements of the solar corona in a very narrow band, with Centre Spatial de Liège as lead institute supported by the Royal Observatory of Belgium and with an industrial team comprising Alcatel-Lucent (BE), AMOS SA (BE), DELTATEC (BE), Fill
Factory NV (BE) and OIP NV (BE)
The two space weather experiments are:
- Dual Segmented Langmuir Probes (DSLP), which will measure electron density and temperature in the background plasma of the Earth’s magnetosphere
- a thermal plasma measurement unit (TPMU), that will measure ion densities and composition
Both were developed by a Czech consortium, led by the Institute of Atmospheric Physics, Academy of Sciences of the Czech Republic (CZ).
In total, ten European countries and Canada were involved in the construction of the Proba-2 satellite.
Effective Engineering
To ensure on board autonomy, mission control system development is an integral part of the overall mission programme, along with the associated operations. Development occurs incrementally, with progressive validation taking place throughout activities ranging from software development, spacecraft integration and system testing to in-orbit operations.
=External links=
Attachments (10)
- Proba-2-in-orbit-rear-view.jpg (107.4 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:01:17.
- PROBA2_Auto1F.jpeg (42.2 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:01:26.
- PROBA2_Auto2.jpeg (17.1 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:01:36.
- PROBA2_Auto14.jpeg (41.2 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:01:52.
- ProbaV_Auto10.jpeg (49.0 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:02:07.
- PROBA2_Auto11.jpeg (56.3 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:02:18.
- ProbaV_AutoF.jpeg (56.7 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:04:58.
- ProbaV_Auto11.jpeg (57.8 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:05:21.
- ProbaV_AutoE.jpeg (9.8 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:05:35.
- ProbaV_Auto12.jpeg (28.2 KB) - added by Marçal Comajoan Cara on 11/13/18 at 21:05:51.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip